Nonlinear System VS Linear System
Introduction
The generalized bell function depends on three parameters a, b and c as given by:
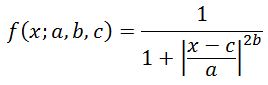
Each of these parameters has a physical meaning: c determines the centre of the corresponding membership function; a is the half width; and b (together with a) controls the slopes at the crossover points. Figure below shows these concepts.
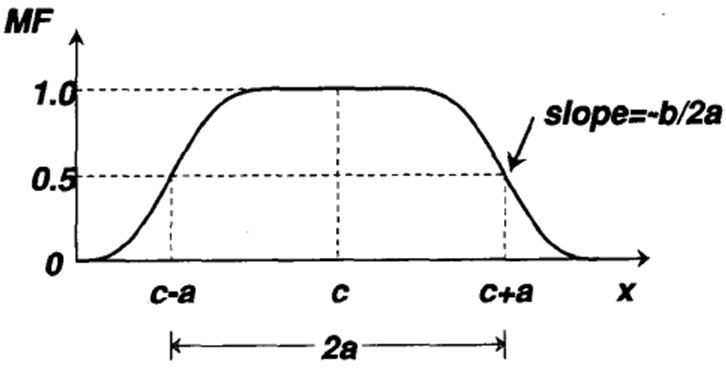
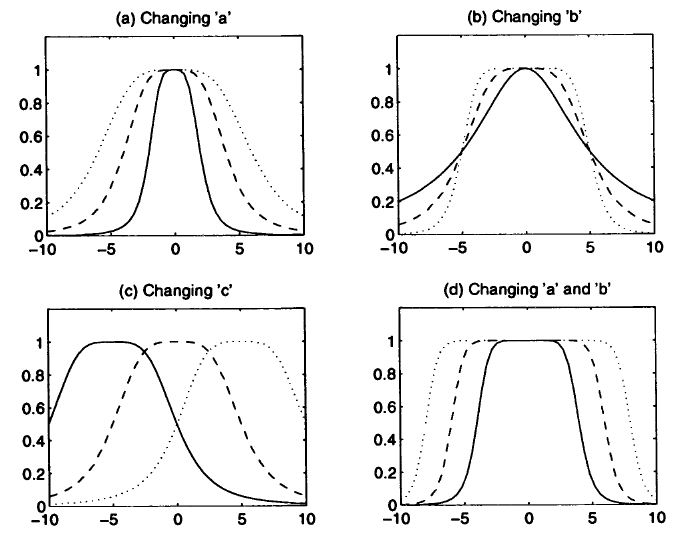
Figure 2: The effects of changing parameters in bell function: (a) changing 'a'; (b) changing 'b'; (c) changing 'c'; (d) changing 'a' and 'b' simultaneously but keeping their ratio constant.
Matlab
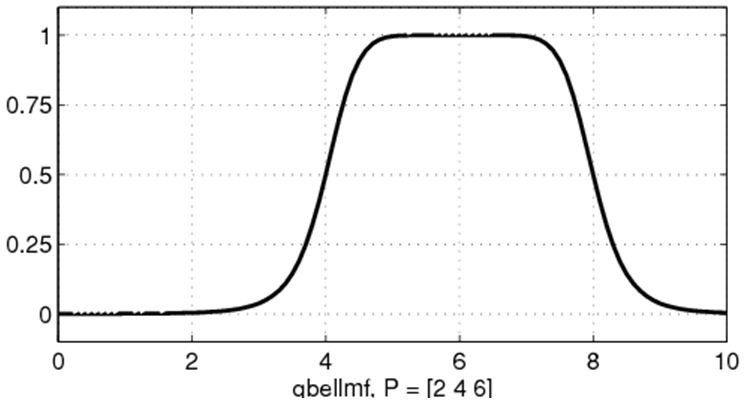
In Matlab, this Bell-shaped function is defined as:
y=dbellmf(x,params)
Example:
x=0:0.1:10;
y=gbellmf(x,[2 4 6]);
plot(x,y)
xlabel('gbellmf, P=[2 4 6]')
References & Resources
- Matlab - http://www.mathworks.co.uk/help/toolbox/fuzzy/gbellmf.html
Latest Post
- Dependency injection
- Directives and Pipes
- Data binding
- HTTP Get vs. Post
- Node.js is everywhere
- MongoDB root user
- Combine JavaScript and CSS
- Inline Small JavaScript and CSS
- Minify JavaScript and CSS
- Defer Parsing of JavaScript
- Prefer Async Script Loading
- Components, Bootstrap and DOM
- What is HEAD in git?
- Show the changes in Git.
- What is AngularJS 2?
- Confidence Interval for a Population Mean
- Accuracy vs. Precision
- Sampling Distribution
- Working with the Normal Distribution
- Standardized score - Z score
- Percentile
- Evaluating the Normal Distribution
- What is Nodejs? Advantages and disadvantage?
- How do I debug Nodejs applications?
- Sync directory search using fs.readdirSync