Bayes theorem
Introduction
In probability theory, Bayes’ theorem (also known as Bayes’ rule) is a useful tool for calculating conditional probabilities.
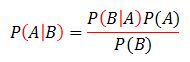
In Bayes’ theorem, each probability has a conventional name:
- P(B│A) is the conditional probability of B, given A. It is also called the likehood.
- P(A) is the prior probability of A.
- P(B) is the prior probability of B.
- P(A│B) is the conditional probability of A, given B. It is also called the posterior probability because it is derived from or depends upon the specified value of B.
To derive Bayes’ theorem
It is quite obvious to know the following two conditions:
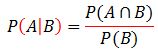
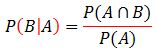
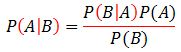
Then, P(A│B)P(B)=P(A∩B)=P(B│A)P(A), and finally, we get:
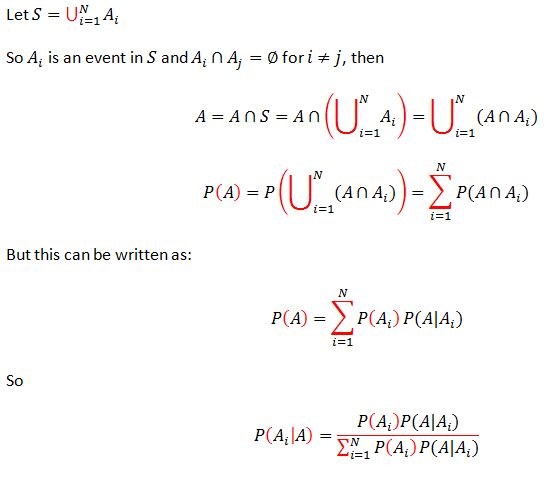
Extension
Extension 1:

Note: P(B,C)= P(B∩C) is the probability of the interaction of B and C.
Extension 2:
For probability densities
There is also a version of Bayes' theorem for continuous distributions. It is somewhat harder to derive, since probability densities, strictly speaking, are not probabilities, so Bayes' theorem has to be established by a limit process; see Papoulis (citation below), Section 7.3 for an elementary derivation. Bayes' theorem for probability densities is formally similar to the theorem for probabilities:

and there is an analogous statement of the law of total probability:
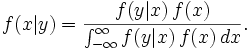
As in the discrete case, the terms have standard names. f(x, y) is the joint distribution of X and Y, f(x|y) is the posterior distribution of X given Y=y, f(y|x) = L(x|y) is (as a function of x) the likelihood function of X given Y=y, and f(x) and f(y) are the marginal distributions of X and Y respectively, with f(x) being the prior distribution of X.
Here we have indulged in a conventional abuse of notation, using f for each one of these terms, although each one is really a different function; the functions are distinguished by the names of their arguments.
References & Resources
- http://en.wikipedia.org/wiki/Bayes%27_theorem
- http://mathworld.wolfram.com/BayesTheorem.html
- Athanasios Papoulis (1984). Probability, Random Variables, and Stochastic Processes, second edition. New York: McGraw-Hill.
Latest Post
- Dependency injection
- Directives and Pipes
- Data binding
- HTTP Get vs. Post
- Node.js is everywhere
- MongoDB root user
- Combine JavaScript and CSS
- Inline Small JavaScript and CSS
- Minify JavaScript and CSS
- Defer Parsing of JavaScript
- Prefer Async Script Loading
- Components, Bootstrap and DOM
- What is HEAD in git?
- Show the changes in Git.
- What is AngularJS 2?
- Confidence Interval for a Population Mean
- Accuracy vs. Precision
- Sampling Distribution
- Working with the Normal Distribution
- Standardized score - Z score
- Percentile
- Evaluating the Normal Distribution
- What is Nodejs? Advantages and disadvantage?
- How do I debug Nodejs applications?
- Sync directory search using fs.readdirSync