Hessian Matrix
Introduction
The Hessian Matrix is a square matrix of second-order partial derivatives of a function. It describes the local curvature of a function of many variables.
Defination from a function
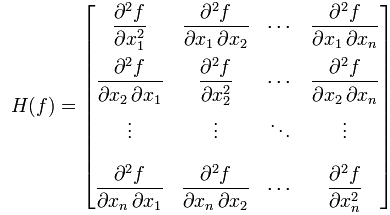
Given the real-valued function f(x1, x2, ..., xn), if all second partial derivatives of f exist and are continuous over the domain of the function, then the Hessian matrix of f is

where x = (x1, x2, ..., xn) and Di is the differentiation operator with respect to the ith argument. Thus
Defination from an existing Jacobian matrix
The Jacobian matrix of the derivatives  ,
,  , ...,
, ...,  of a function
of a function  with respect to x1, x2, ..., xn is called the Hessian H of f, i.e.
with respect to x1, x2, ..., xn is called the Hessian H of f, i.e.
Applications
Hessian matrices are used in large-scale optimisation problems within Newton-type methods because they are the coefficient of the quadratic term of a local Taylor expansion of a function. That is

Vector-valued functions
If f is instead a function from  ,i.e.
,i.e.

then the array of second partial derivatives is not a two-dimensional matrix of size  , but rather a tensor of order 3. This can be thought of as a multi-dimensional array with dimensions
, but rather a tensor of order 3. This can be thought of as a multi-dimensional array with dimensions  , which degenerates to usual Hessian matrix for m=1.
, which degenerates to usual Hessian matrix for m=1.
Note: The Vector-valued function can be found from Jacobian matrix.
References & Resources
- http://en.wikipedia.org/wiki/Hessian_matrix
- http://mathworld.wolfram.com/Hessian.html
Latest Post
- Dependency injection
- Directives and Pipes
- Data binding
- HTTP Get vs. Post
- Node.js is everywhere
- MongoDB root user
- Combine JavaScript and CSS
- Inline Small JavaScript and CSS
- Minify JavaScript and CSS
- Defer Parsing of JavaScript
- Prefer Async Script Loading
- Components, Bootstrap and DOM
- What is HEAD in git?
- Show the changes in Git.
- What is AngularJS 2?
- Confidence Interval for a Population Mean
- Accuracy vs. Precision
- Sampling Distribution
- Working with the Normal Distribution
- Standardized score - Z score
- Percentile
- Evaluating the Normal Distribution
- What is Nodejs? Advantages and disadvantage?
- How do I debug Nodejs applications?
- Sync directory search using fs.readdirSync